Lidar
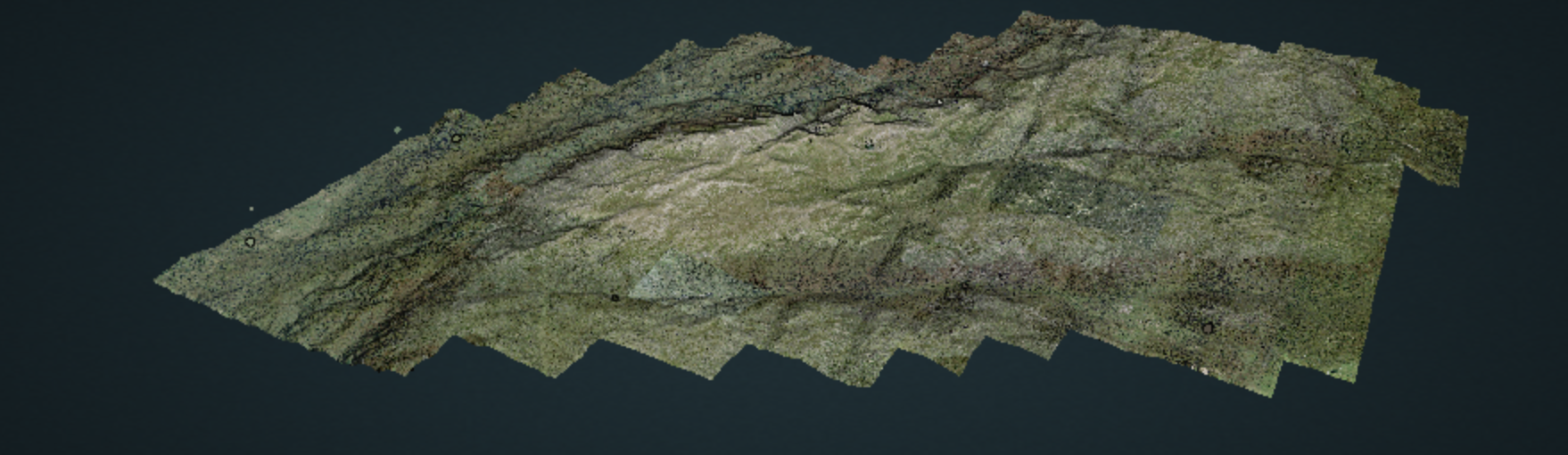
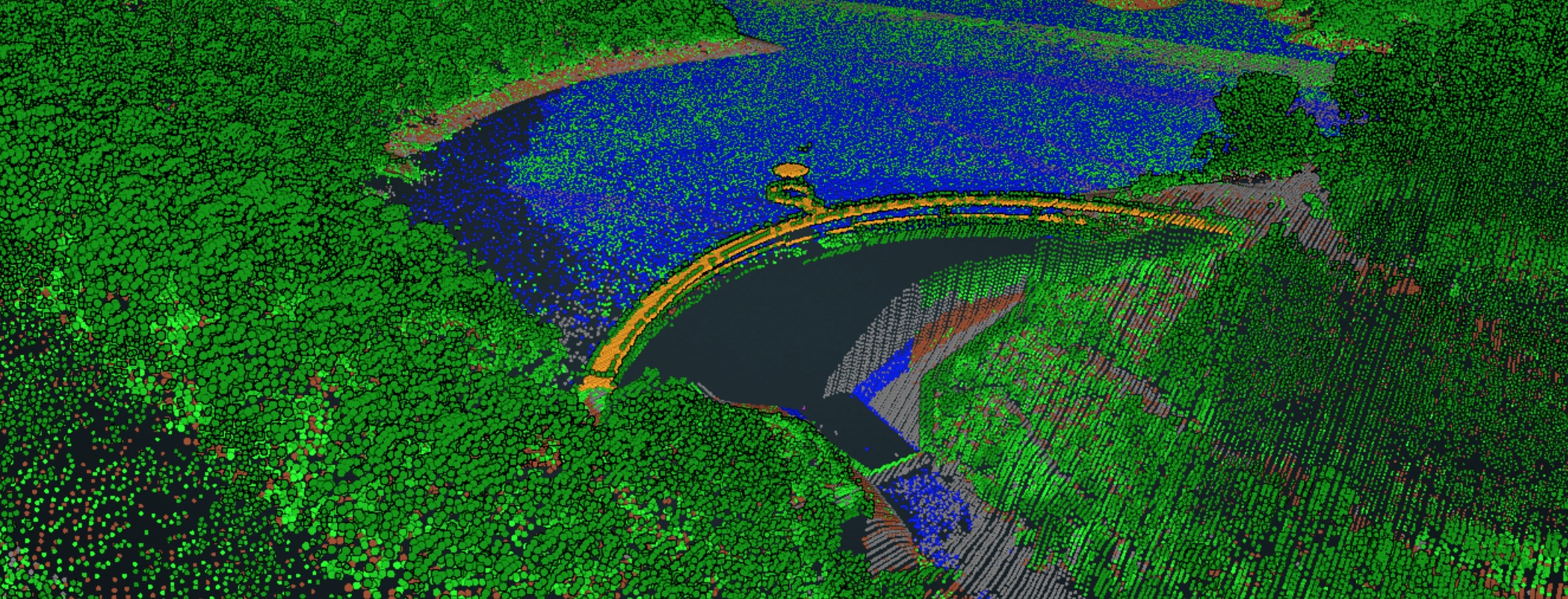
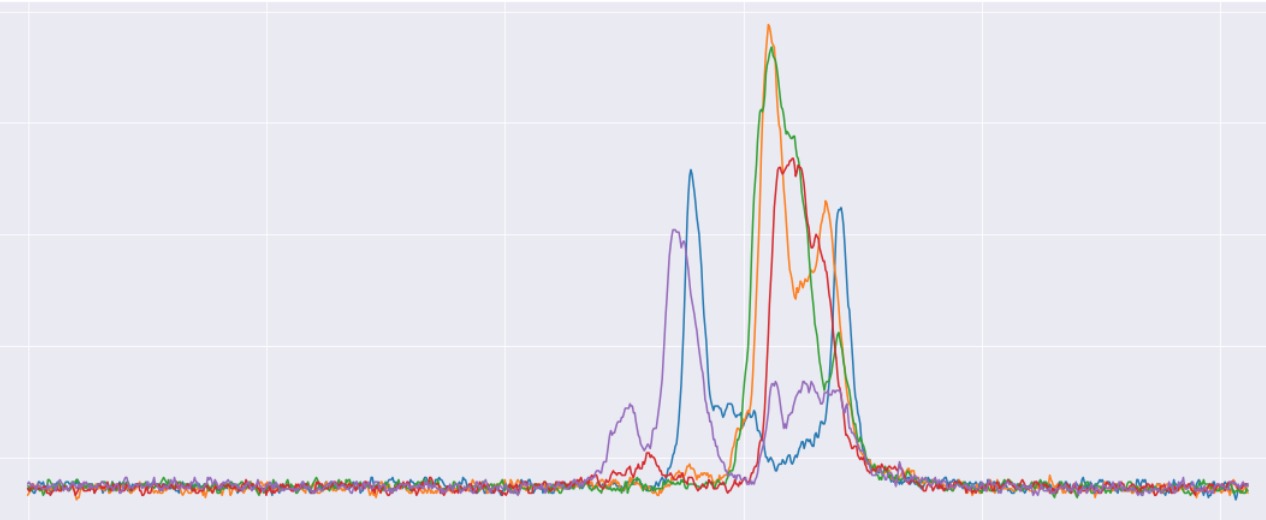
Working with lidar data, and attributes of lidar systems. Focused on understanding natural evironments using airborne scanning.
Working with lidar data, and attributes of lidar systems. Focused on understanding natural evironments using airborne scanning.